2022年9月1日
魔改造の夜|エンジニアによる開発秘話
ネコチーム 本体班編:「ネコちゃん」の素早いまっすぐな走りとかわいさの秘訣
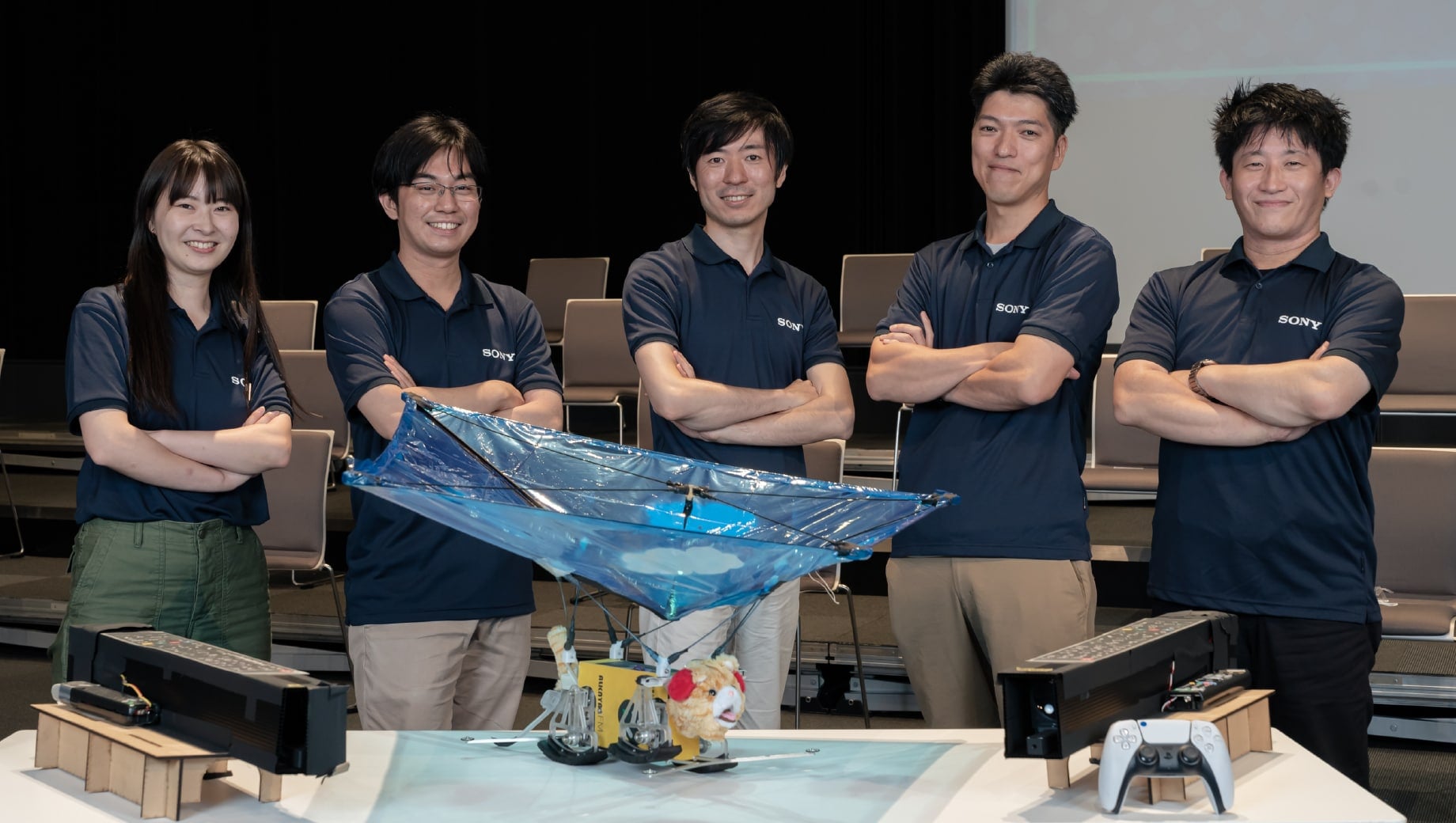
左から岩船、小嶋、内山、青木、中川(尾崎、瀬川、館、西岡は不在)
エンジニアたちが極限のアイデアとテクニックを競う、NHK BSプレミアムの技術開発エンタテインメント番組「魔改造の夜」。
“子どものおもちゃ”や“日常使用の家電”を魔改造しモンスターマシンへと姿を変える興奮と感動の夜会。その第5弾「ネコちゃん落下25m走」と「電気ケトル綱引き」に、ソニーグループのエンジニアたちが挑戦、1か月半魔改造に励み、闘いに挑んだ。
本シリーズでは、モノづくりへの熱き思いを持った挑戦者たちに迫る。
今回は「ネコちゃん落下25m走」のモンスター開発に携わった通称「ネコチーム」のうち、主に本体の開発を担当したチームメンバーに話を聞いた。
「四足歩行×6m落下」という難題
──今回のテーマが発表されたときは、どのように感じて、なぜネコチームを選びましたか?
小嶋:「6m落下」と聞いてぶっ飛んだお題を出してきたなというのが率直な感想です(笑)。私はもともと月面といった極限環境で探査するロボットを研究していました。まさしく今回は「6m落下」させるという過酷な条件で、とても難しくも面白いお題と感じたため、ネコチームを選びました。また、過去参加したことのあるロボコン(サイバスロン)のような体験をもう一度したかったということもあります。
中川:学生時代に歩行ロボットの研究を行っていたこともあり、「ネコちゃん」のお題は非常に身近に感じました。同時に、このお題は環境(走行コース)をいかに早く立ち上げるかが重要なポイントになると考え、コース製造担当として立候補しました。
青木:メカ設計の経験を活かせそうなことと、純粋に早く走らせた方が勝ちというシンプルなお題の方が、僕の性分に合っていると思ってネコチームを選びました。
館:ネコ好きでネコも飼っていたのでネコチームにしました。専門性としては多分ケトルの方が近かったんですけどね。
内山:学生のときに歩行機構で戦うロボコンに参加した経験もあり、「ネコちゃん」を選びました。はじめのテーマを聞いたときには落下がつらいなと思いました。自分が普段設計している製品の落下試験ではもっと低い高さから落としているんですが、それでも苦労するので。

6m落下試験をしている様子 (実験環境協力:株式会社HIGASHI-GUMI)
──6m落下は確かに難関ポイントだったと思います。落下を含め、魔改造の中で苦労した点について教えてください。
内山:「ネコちゃん」が全然まっすぐ歩かないことです。ゆっくりの時はまっすぐ歩くけど、速くなるとまっすぐ歩いてくれず、その原因がわからない状態が続いていました。同じく本体の機構設計を担当した西岡さんには、Mark 1(1号機)とMark 2(2号機)のうち、片方はまっすぐ歩いて、片方は曲がる状態だったので、「2つの違いから原因を解析して、まっすぐ歩かせてください!」という無茶ぶりをしていました。

魔改造真っ最中の「ネコちゃん」
西岡:当時、最初にできたMark 1と改善版のMark 2は部品がかなり違ったので、部品を一つ一つ交換して走らせることをひたすら繰り返していました。最終的にはカイト(落下速度を抑制するために「ネコちゃん」の背中につけたパーツ)の完成版を装着したらなぜか上手くいきました。
内山:カイトの重さを考慮した設計はしていないので、実はたまたまうまくいきました。
青木:あとは、地面と足との滑りの部分もコントロールできずに苦労しました。地面をつかんでその摩擦で前に行くのはメカニズム的に大変だなと感じていました。
尾崎:今回内山さんたちの依頼で高い精度が必要な部品は私が加工することになったのですが、急な話だったので、使える道具を確保するのが大変でした。刃物や治具を探すのも大変で、見つけた後もその刃物を研ぐ機械(工具研削盤)など最近あまり使っていなかった装置や道具の整備にも苦労しました。そんな中、使用できる材料にも限りがあるため失敗が許されない緊迫感もありましたが、最後まで心を込めて作りました。
──普段の専門性が活かされたところはありますか?
小嶋:宇宙など極限環境で活動するロボット開発では、メンテナンスが困難であり故障リスクを少なくする目的で、いかにシンプルな機構かつ少ない部品で狙った動きを実現するかが重要でした。今回の「ネコちゃん」では、足をシンプルな構造にするために、足とは別の構造で操舵することを検討しました。最終的には「しっぽで機体を操舵する」というユニークな手法を採用し、シンプルかつ少ない部品点数で機体を操舵することを実現しています。
中川:私は業務でも短期間での試作を要求されることが多いため、そこで培った「短期で完成させるスキル」は魔改造にも活かされました。完成まで数時間で部品を作ることも度々ありましたね。
速さや機能だけでない、ネコっぽさやかわいさへのこだわり
──今回の魔改造した「ネコちゃん」で自慢したいところはどこでしょうか?また、さらに伸ばせるところがあれば教えてください。
内山:自慢したいのは“ネコっぽく落ちる”ことを実現するために足から落ちるところです。足から落ちると強い衝撃がかかりますが、完走できるくらいの強度は保ち、かつあまり減速せずに走れたのは自慢ポイントです。伸びしろとしてはモーターに供給する電源の電圧をあげてさらに速く走らせることです。
岩船:外装については自慢ポイントが4つあります。1つはボディをソニーの過去の代表的な製品を彷彿させるようなデザインにしたところ。2つ目はヘッドホンを付けている姿。3つ目はピンっと立ったモフモフなしっぽ。最後がキュルキュルのおめめが見えるように顔の毛をカットしたところです。魔改造する元の「ネコちゃん」の良さを活かしつつ、トータルでソニーっぽくかわいい「ネコちゃん」に仕上がったと思います。

夜会当日走った完成版「ネコちゃん」
西岡:普通にまっすぐ走るだけではなく、ラジコンみたいに自由自在にコントロールして走らせることができるところはぜひ自慢したいです。
小嶋:ネコらしい四足歩行としっぽが動く姿を実現できたのは嬉しかったですし、自慢したいです。ただ、まだ伸びしろがたくさんあると思っています。例えば、しっぽ操舵用のモーターは開発初期に「これ使ってみようよ」と何気なく決めていたものを最後まで使い続けたので、本体の重さや操舵制御の応答性はもっとブラッシュアップできると考えています。
瀬川:アップデートをする時には鳴くための笛をつけてもらわなきゃと思っています(笑)。
小嶋:確かにそうですね。もともとの「ネコちゃん」は鳴くことが出来ていたのですが、その鳴き声を出すための笛パーツを時間や機構の制約上入れることが出来ませんでした。次にアップデートできるチャンスがあれば、ぜひかわいく鳴く「ネコちゃん」にしてあげたいですね。
普段は関わらない部署のメンバーとの出会い
──同じソニーグループではあるものの、普段の業務では関わらないメンバーと1か月半魔改造に取り組みましたが、いかがでしたか?
中川:メンバー全員に感謝と尊敬です。専門性のない箇所を担当しカタチにした人もいれば、埋まっていない箇所を埋めるように作業していた人もいる、全メンバーの突貫力がとにかくすごいと思いました。関われた事に感謝しかありません。

夜会当日「ネコちゃん」と一緒に。左から館、小嶋、青木、内山、西岡
館:特定の誰かではなく、皆さん本当すごいなと思いました、それぞれスキルを持っていて、手を動かす能力が高かったです。魔改造期間の最初の頃、岩船さんと眞鍋さん(カイトを担当したチームのメンバー)と一緒に「テオ・ヤンセンのビースト機構」(歩行するリンク機構の一種)を作っているときは2人の諦めない姿勢に非常に感銘を受け、自分も頑張らなきゃと思いました。
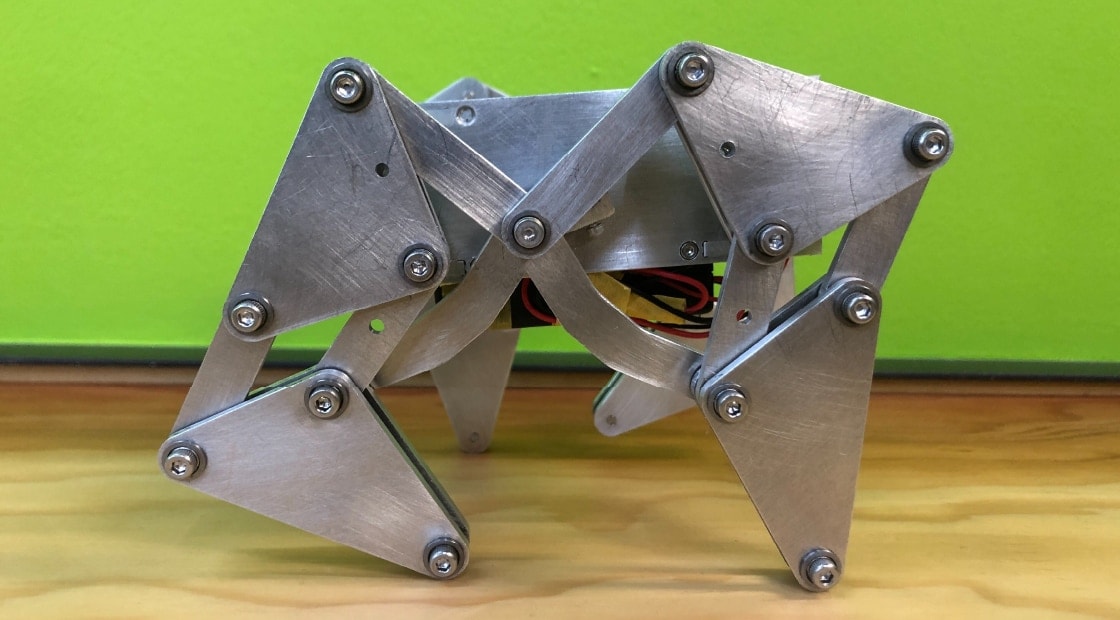
テオ・ヤンセンのビースト機構
岩船:ロボコン経験やスキルがある方が多い中で、私は動く金属製のロボットを作るのが初めてでした。そのため、せめてガッツだけはという気持ちで頑張っていました(笑)。ロボット初心者の私でもサポートではなく、テオ・ヤンセンの機構など脚機構の検討から密に携わる機会を与えて下さりチームメンバーの皆さんやメンターの森永さんにはとても感謝しています。また、外装チームは当初一人で納品日が近づいても完成しておらず心が折れそうだったのですが、そんな様子を察して館さんと青木さんが外装チームに入ってくれました。お二人のお陰でなんとか形になり、本当に救われました。
青木:プロジェクトマネジメントを担った瀬川さんには感謝しています。全体を見ながら、サポートだけじゃなくて、プロジェクトの進行にも気をかけて、みんなが仕事をしやすいように真剣に考えてくれました。私にはできないってことで、心の底から尊敬しています。
内山:皆さんに部品の設計や製作をお願いすることが多かったのですが、そのお願いする部分を青木さんが代わりに担ってくれたので、すごく助かりましたし感謝しています。かなり無茶なお願いもしていましたし、全部自分でお願いしていたら辛かったと思います。
尾崎:青木さんの拝み倒しは上手かったよ(笑)。
──今回のプロジェクトを通して、全体の感想を教えてください。
内山:一言で言うと、始めから最後まですごく楽しかったです。ガムシャラにできる環境を用意していただいて感謝しています。
岩船:夜会まで数日というときに、外装が足に引っかかって途中で止まってしまったことがありました。そのため夜会当日は「外装が悪さをして止まることがないように」とひたすら祈っていました。魔改造全体の感想としては、毎日行く度に新しい発見があったり、出来ることが増えてゆき、スキルを身につけるという意味でもとても勉強になった1か月半でした。
尾崎:若い人たちがここまで情熱をもって、細部までこだわって取り組んだプロジェクトにメンバーとして加われてとても嬉しかったです。
中川:普段とは異なり、様々な部署から有志で集まったメンバーと取り組む短期プロジェクトという特殊な環境で、改めて自分の得意・不得意を見つめなおす機会にもなり、得るものが大きかったなと感じています。
館:当日は緊張もしましたが、「ネコちゃん」の走る姿から各メンバーの頑張ったところが思い出され、一人ひとりの顔が浮かんできて、とても印象的な試技でした。色々な人が色々なスキルを持っていて、自分が身につけたいスキルや、ありたい姿を毎日学ばせてもらいました。
チームメンバー
-
青木 翔平
ソニー株式会社
イメージングプロダクツ&ソリューションズ事業本部
交換レンズ開発のプロジェクトマネジメントを担当。番組「魔改造の夜」のファン。
-
岩船 美友
ソニーグループ株式会社
R&Dセンター
人の自然なふるまいを活用し、機器との自然なインタラクションを目指すNatural User Interfaceの要素技術の開発を担当。
-
内山 了介
ソニー株式会社
ホームエンタテインメント&サウンドプロダクツ事業本部
約10年スピーカーのメカ設計を経て現在はヘッドホンの音響シミュレーションを担当。ロボコンへの出場経験が豊富。
-
尾崎 勝
ソニーグローバルマニュファクチャリング&オペレーションズ株式会社
レンズセンター
「現代の名工」。今回、その卓越した工作加工技術を生かして、高精度の部品を数多く製作。
-
小嶋 洋至
ソニー株式会社
モバイルコミュニケーションズ事業本部
新規事業のメカ設計を担当する入社2年目。学生時代には宇宙ロボット開発やサイバスロン(障がいのある方×ロボティクスの競技)出場の経験がある。
-
瀬川 真智子
ソニーセミコンダクタソリューションズ株式会社
デザイン&システム技術プラットフォーム部門
普段はプロジェクトマネジメントオフィスにてプロジェクト進行推進を行う。「魔改造の夜」においてはエンジニアのサポートや全体のプロジェクトマネジメントを担った。
-
館 龍
ソニーグループ株式会社
AIロボティクスビジネスグループ
メカ設計を担当。約2年前までは自動車会社にて電気自動車のバッテリーの設計エンジニアをしていた。
-
中川 祥
ソニーセミコンダクタソリューションズ株式会社
(ソニーグループ(株)R&Dセンターも兼務)
宇宙空間を含む遠距離無線技術を用いた様々なアプリケーションの可能性を模索している。
-
西岡 勇人
株式会社ソニーコンピュータサイエンス研究所
ピアニストのための熟達支援の技術やアプリを開発。手指外骨格ロボット、ウェブアプリからプロジェクトマネジメントまで幅広く対応。